
Description
***NOTE: CALL US at (877)-407-5969 FOR PRICE!
RoboBuilder UXA-90 Humanoid Robot
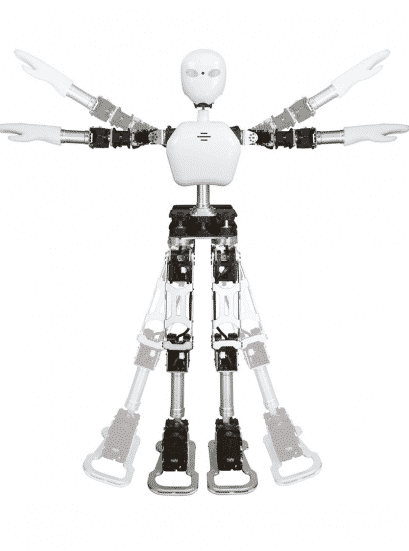
The UXA-90 Humanoid Robot is a well-proportioned 1m tall robot humanoid. It has been designed with a structure similar to the ratio of the ideal human body. Since the skeletal structure of the robot imitates the one from a human, it is possible to produce humanlike movement patterns. Because it uses various programming sources, it can be controlled in a lot of different ways. The robot also has pre-programmed emotional gestures and mouth expressions with synchronized sounds. Users can create a new appearance for the robot using the various pre-designed source files. The source files provide details to assemble the structure such as size, position of devices, bolts and nuts. Robot application: education, performance and advertisement, service and research.

Features
- Well-proportioned 1m tall humanoid shaped robot
- Fall detection algorithm utilizing a 9-axis IMU sensor
- 300FPS vision processing at 320×240 pixels
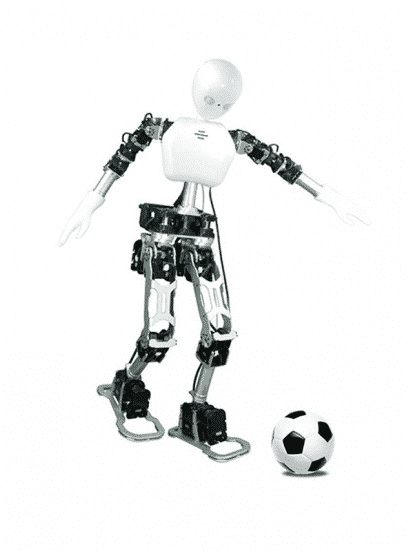
- Fully supports soccer mode for Robocup competition
- Walking algorithm for biped humanoid robot with balancing control
- Body design resembling Da Vinci\’s Vitruvian Man
- Very good at kicking the ball and localizing the net
- Speech and play sounds with 3W speaker
- Recognize and track the color and shape of an object (e.g. an orange ball)
- Real time distance calculations
- Embedded automatic getting-up behavior function from the supine posture
- Provide software tool for building performance motions easily
- Performance motion can be fully synchronized with the sound source
Various Application
From a performance on stage to a presentation on behalf of a person, this robot does it all. In addition, the robot can be used to participate in a humanoid robot competition and can also be used as a platform in research for HRI and AI as well as education of programming.
Education
- Programming language & algorithm
- Designing mechanism
Performance & advertisement
- Dynamic dance in events
- Robot plays in theater
- Exhibition to promote products
Service
- Presentation
- Providing information
Research
- HRI (Human Robot Interaction)
- Artificial intelligence
- Humanoid robot competition
Source Code and Libraries/Open Source

Windows based Object Recognition Software
- Visual C# source code for tracking an object with vision processing
- UXA90 can play soccer on its own at ROBOCUP competition
Management software tools
- SAM control software for managing servos individually
- Contents and motion building tool
- Behavior pattern planning tool
- Motion management tool
Android based
- Android app for control and build
- Android app controls and creates behavior and motion patterns wirelessly
Linux Based (under development)
- R.O.S-based framework
- Gazebo for 3D rigid-body dynamics simulation
- RVIZ plugin for 3d visualization environment
Specifications
Degrees of Freedom(DOF)
- 23 DOF
- 12 DOF Leg, 8 DOF Arm
- 1 DOF Waist, 2 DOF Head
4-DOF Arm (x2)
- Elbow: 2 DOF SAM30 x2
- Shoulder: 2 DOF (SAM160 x1/ SAM100 x1)
6-DOF Leg (x2)
- Hip: 3 DOF (SAM160x1 / sam210 x2)
- Knee: 1 DOF (SAM210 x1)
- Ankle: 2 DOF (SAM210 x2)
- 1-DOF waist (x1): 1 DOF (SAM160x1)
- 2-DOF head (x1): 2 DOF (SAM30 x2)
Sensors
- Inertial: IMU 2g 9axis, – 180 degree (roll/yaw), -90 degree (pitch)
- FSR module (optional) x2: 4 sensors in each foot
Computer
- CPU: AMD E2-1800 Processor dual-core 1.7GHz
- RAM: 2GB DDR RAM
- Storage: 64GB (SSD)
- Wireless: 802.11 b/g/n
External interfaces
- USB 2.0 x2, Ethernet 10/100/1000 Base T
- USB 3.0 x2, HDMI x1
Interfaces
- Speaker (x1): Front
- Microphone (x1): In vision camera
- Vision camera: Logitech C905/ HD 1600×1200 PX
Battery
- Type: LiPo 18.5V, 3000mA
- Operating duration: 20min (frequent movement) / 40min (stand-by)
- Charging time: 30min
Operation System
Windows based
- Easy motion building software/ soccer mode C# application / MSRDS samples with Kinect sensor
- Autonomous soccer mode, performance mode, presentation mode
- Pre-programmed walking and performance motions
Linux based
- ROS base middleware package
- Gazebo for 3D rigid body dynamics simulation
- RVIZ plugin for 3D visualization environment
- Walking / Grasping / Recognition Control
Dimensions
- Height: 100cm
- Width: 35cm
- Weight: 9.5kg/20lb
- Walking Speed: 30cm/s, Full step walking forward


Reviews
There are no reviews yet.